上一篇
FlexTok是什么?一文让你看懂FlexTok的技术原理、主要功能、应用场景Helix是什么?一文让你看懂Helix的技术原理、主要功能、应用场景
来源:卓商AI
发布时间:2025-04-05
Helix概述简介
Helix 是 Figure 推出的通用视觉-语言-动作(VLA)模型,用于人形机器人的控制。Helix首创性地实现对机器人整个上身(包括手腕、躯干、头部和手指)的高速率(200Hz)连续控制,支持多机器人协作,多个机器人共用同一组神经网络权重完成任务。Helix 基于自然语言指令拿起从未见过的物品,表现出强大的泛化能力。Helix 的训练完全端到端,无需任务特定的微调,在低功耗 GPU 上运行,具备商业部署潜力。
Helix的功能特色
全上身控制:对机器人整个上半身(包括手腕、躯干、头部和手指)进行高速率(200Hz)的连续控制,实现高精度的动作协调。
多机器人协作:支持多个机器人同时运行同一套神经网络权重,实现协作完成任务,例如共同搬运或整理物品。
自然语言理解与执行:机器人基于自然语言指令完成各种任务,例如拿起从未见过的物品、操作抽屉或冰箱等。
强大的泛化能力:处理数千种形状、大小和材质各异的物品。
商业部署能力:完全在低功耗嵌入式 GPU 上运行,适合大规模商业化应用。
Helix的技术原理
系统2(S2):基于 7B 参数的开源视觉语言大模型(VLM),负责场景理解和语言理解。处理频率为 7-9Hz,用于“慢速思考”高级目标,将视觉和语言信息转化为语义表征。将语义信息编码为连续的潜在向量,传递给系统1。
系统1(S1):基于 80M 参数的 Transformer 编码器-解码器架构,用于底层控制。处理频率为 200Hz,快速执行和调整动作。将 S2 传递的潜在向量与视觉特征结合,转化为精确的机器人动作(如手腕姿态、手指控制、头部和躯干方向)。
端到端训练:从原始像素和自然语言指令映射到连续动作输出,使用标准回归损失进行训练。训练过程中引入时间偏移,模拟 S1 和 S2 的推理延迟,确保训练与部署的一致性。
解耦架构:S1 和 S2 分别运行在不同的时间尺度上,S2 负责高级语义规划,S1 负责实时动作执行。既保证系统的泛化能力,又实现了快速响应。
优化推理部署:在机器人上,S1 和 S2 分别运行在独立的 GPU 上,S2 异步更新潜在向量,S1 实时执行动作控制。
Helix项目介绍
项目官网:https://www.figure.ai/news/helix
Helix的技术原理
家庭服务:整理物品、收纳、操作家电等日常家务。
多机器人协作:多个机器人共享一套神经网络,共同完成搬运或组装任务。
物品抓取:基于自然语言指令抓取从未见过的物品,适用于物流和仓储。
工业自动化:用在复杂的人机协作任务,如零部件装配和质量检测。
服务行业:在酒店、餐厅等场所提供引导、递送和清洁服务。
© 版权声明:本站所有原创文章版权均归卓商AI工具集及原创作者所有,未经允许任何个人、媒体、网站不得转载或以其他方式抄袭本站任何文章。
相关文章
-
 Eliza是什么?一文让你看懂Eliza的技术原理、主要功能、应用场景2025-04-05
Eliza是什么?一文让你看懂Eliza的技术原理、主要功能、应用场景2025-04-05 -
JanusFlow是什么?一文让你看懂JanusFlow的技术原理、主要功能、应用场景2025-04-05
-
LongRAG是什么?一文让你看懂LongRAG的技术原理、主要功能、应用场景2025-04-05
-
X-Portrait 2是什么?一文让你看懂X-Portrait 2的技术原理、主要功能、应用场景2025-04-05
-
IC-Light是什么?一文让你看懂IC-Light的技术原理、主要功能、应用场景2025-04-05
-
DiffuEraser是什么?一文让你看懂DiffuEraser的技术原理、主要功能、应用场景2025-04-05

卓商AI
AI爱好者的一站式人工智能AI工具箱,累计收录全球10,000⁺好用的AI工具软件和网站,方便您更便捷的探索前沿的AI技术。本站持续更新好的AI应用,力争做全球排名前三的AI网址导航网站,欢迎您成为我们的一员。
最新发布
1
2
3
4
5
6
7
8
9
10
猜你喜欢
Myko Assistant
Myko Assistant 是由 Myko AI 公司开发的一款高级人工智能助手,旨在通过电子邮件帮助用户快速获取所需的信息,如潜在客户、公司研究、...
Supermeme.ai
Supermeme.ai是一款AI生成表情包的产品。它利用先进的人工智能技术,可以快速生成各种有趣的表情包。用户只需上传一张图片或选择模板,Super...
Embra.ai
Embra 是一款创新的 AI 操作系统,专为现代企业设计,旨在通过 AI 技术整合销售与产品开发流程。它通过智能会议记录、任务自动化、多语言支持等功...
你和狗的区别
这是一个提供趣味互动和娱乐内容的网站,通过轻松幽默的方式让用户探索与狗的相似之处,同时提供其他多种娱乐功能,如星座运势、歌词接龙等,旨在为用户带来轻松...
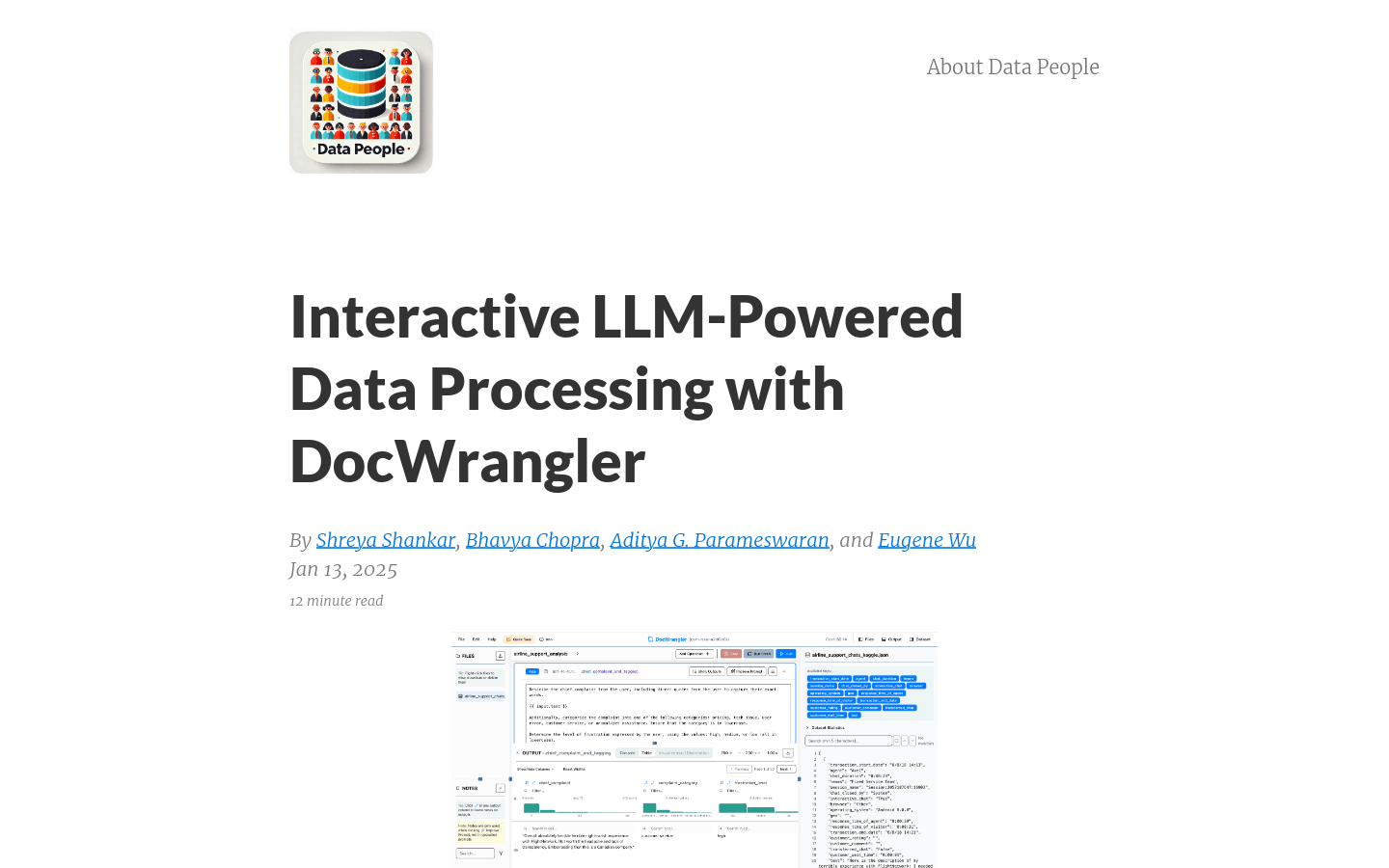
DocWrangler
DocWrangler是一个开源的交互式开发环境,旨在简化构建和优化基于大型语言模型(LLM)的数据处理管道的过程。它提供即时反馈、可视化探索工具和A...
KapKap
KapKap是一款基于AI的唇同步视频生成工具,帮助创作者制作高转化的营销视频。您可以使用语音转文字获取文案,使用4K相机拍摄高清产品视频,使用自动提...

wordform ai
使用WordForm AI最大化博客的影响力! WordForm AI驱动的内容生成器为您的确切声音量身定制了高质量的品牌文章,并提高了SEO,以提高...
Suno AI
Suno AI是一款通过人工智能创作音乐和语音的产品。它利用先进的算法和数据模型,能够生成高质量的音乐和语音作品。Suno AI具有以下功能和优势:1...
AI爱好者的一站式人工智能AI工具箱,累计收录全球10,000⁺好用的AI工具软件和网站,方便您更便捷的探索前沿的AI技术。本站持续更新好的AI应用,力争做全球排名前三的AI网址导航网站,欢迎您成为我们的一员。
